 Перейти к содержимому
Перейти к содержимому 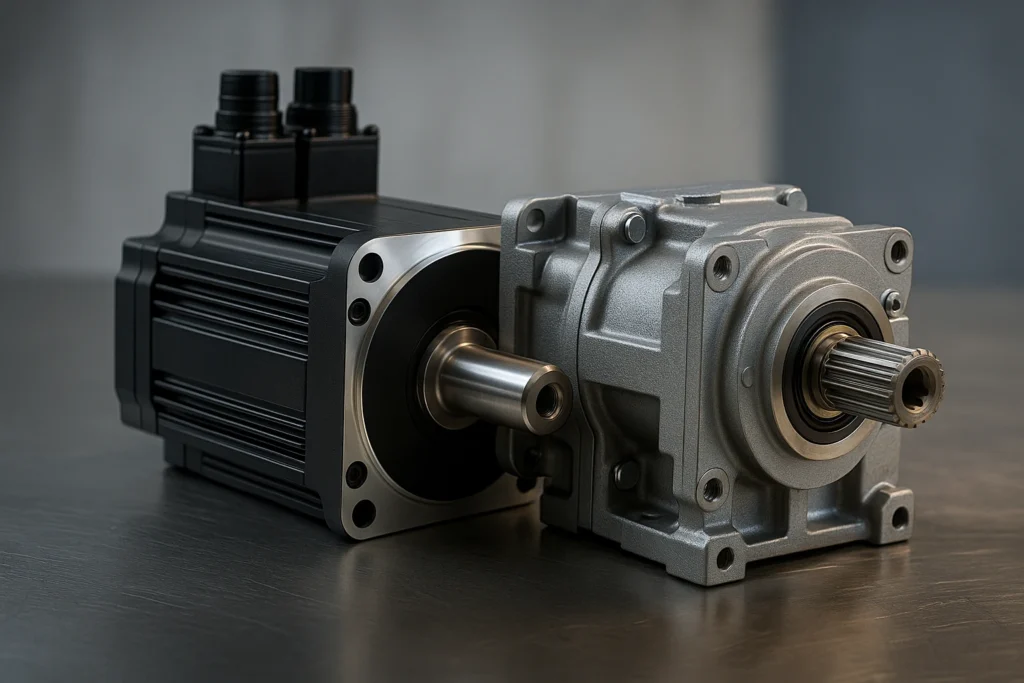
Серводвигатель и редуктор: зачем применять и как рассчитать передачу
Современные производственные линии и автоматизированные системы предъявляют повышенные требования к точности, скорости и надёжности движения исполнительных механизмов. Для этих задач чаще всего применяются серводвигатели — электромеханические приводы с точным управлением положением, скоростью и моментом. Однако в большинстве случаев одного двигателя недостаточно для оптимальной передачи усилия на рабочий орган. Здесь на помощь приходит редуктор, который снижает скорость вращения и одновременно увеличивает крутящий момент, обеспечивая согласование характеристик двигателя и нагрузки.
Комбинация серводвигателя и редуктора позволяет реализовать плавное движение, устранить рывки при старте и остановке, повысить жёсткость системы и обеспечить повторяемость позиционирования с точностью до долей градуса. Такой подход широко используется в станках с ЧПУ, роботах, упаковочных и дозировочных машинах, транспортных системах и других автоматизированных установках.
При этом важным аспектом является правильный подбор и расчёт передачи. Ошибка даже в нескольких процентах при определении передаточного отношения может привести к перегрузке вала, вибрациям, перегреву и сокращению срока службы узлов. Поэтому инженерный расчёт должен учитывать не только мощность и момент двигателя, но и инерцию нагрузки, КПД редуктора, требуемую точность и скорость отклика.
Неправильно подобранный редуктор к серводвигателю способен свести на нет все преимущества системы. Перегрузка на валу, превышение инерции и тепловые перегрузки быстро выводят привод из строя, вызывая остановку оборудования и финансовые потери.
Почему серводвигателю часто необходим редуктор
Серводвигатель предназначен для точного управления движением, но сам по себе он не всегда способен обеспечить требуемый крутящий момент на рабочем органе. Большинство серводвигателей имеют высокую скорость вращения (до 3000–5000 об/мин) при сравнительно низком моменте. В то же время большинство исполнительных механизмов — конвейеры, манипуляторы, оси станков — требуют высокого момента при низкой скорости. Чтобы согласовать эти параметры, между двигателем и нагрузкой устанавливают редуктор.
Редуктор выполняет две основные функции:
- Снижение скорости вращения — за счёт передачи с передаточным отношением i>1;
- Увеличение выходного крутящего момента — пропорционально передаточному отношению и КПД.
Простыми словами, если двигатель развивает 1 Н·м при 3000 об/мин, а редуктор имеет передаточное отношение 10:1 и КПД 0,95, на выходе можно получить около 9,5 Н·м при скорости 300 об/мин. Это делает систему более устойчивой и точной при перемещении нагрузки.
Кроме того, редуктор помогает снизить инерцию нагрузки, которая передаётся на вал двигателя. Для серводвигателей важно, чтобы отношение инерции нагрузки к инерции ротора не превышало определённый диапазон (обычно 3:1…5:1). Если нагрузка слишком “тяжёлая” для двигателя, возникают колебания, вибрации и ухудшается точность позиционирования. Редуктор решает эту проблему, «разделяя» инерции и стабилизируя систему.
Также применение редуктора позволяет:
- уменьшить токовые нагрузки при старте и остановке;
- обеспечить плавность движения и отсутствие рывков;
- продлить срок службы двигателя и механических узлов;
- снизить шум и вибрации при работе на низких скоростях.
Важно понимать, что установка редуктора не всегда обязательна. Если двигатель работает с небольшой нагрузкой или механизм требует высокой скорости, то применение редуктора лишь усложнит систему и снизит КПД. Однако в большинстве промышленных применений редуктор становится необходимым элементом, обеспечивающим оптимальный баланс между динамикой, моментом и точностью.
Работа серводвигателя без редуктора при высокой нагрузке приводит к перегрузке обмоток, избыточному току и перегреву. В результате двигатель теряет точность и выходит из строя задолго до конца заявленного ресурса. Использование редуктора в таких условиях — не опция, а инженерная необходимость.
Виды редукторов для серводвигателей и их особенности
Редуктор в системе с серводвигателем должен не только увеличивать крутящий момент, но и обеспечивать минимальный люфт, высокий КПД и стабильную работу при частых реверсах. В отличие от обычных приводов, сервоузлы предъявляют более жёсткие требования к точности, плавности хода и динамической жёсткости передачи. Поэтому выбор типа редуктора — один из ключевых этапов проектирования системы.
Наиболее распространённые типы редукторов для серводвигателей:
1. Планетарный редуктор
Самый популярный вариант в сервосистемах. Компактная конструкция, высокий КПД (до 97–98%), минимальный люфт (от 1 до 10 угл. мин.) и высокая передача крутящего момента при небольших габаритах. Планетарные редукторы хорошо подходят для робототехники, позиционирующих осей, подающих механизмов.
2. Цилиндрический (коаксиальный) редуктор
Простая и надёжная конструкция, обычно с зубчатой передачей прямого или косозубого типа. Обеспечивает стабильную работу при постоянной нагрузке, но имеет больший люфт (до 20–30 угл. мин.) и средний КПД (90–95%). Применяется в системах, где не требуется высокая точность позиционирования, например, в транспортных или смесительных установках.
3. Червячный редуктор
Обеспечивает плавный, тихий ход и большое передаточное отношение в компактном корпусе. Однако КПД ниже (70–85%), а люфт выше, чем у планетарных моделей. Используется там, где важна плавность и самоторможение, например, в подъёмных и дозирующих механизмах.
4. Гармонический (волновой) редуктор
Отличается высокой точностью, практически отсутствием люфта (менее 1 угл. мин.) и большим передаточным отношением при минимальных габаритах. Применяется в роботах, станках высокой точности и медицинском оборудовании. Недостаток — высокая стоимость и ограниченный ресурс при больших нагрузках.
Для наглядности можно сравнить основные характеристики различных типов редукторов:
| Тип редуктора | КПД (%) | Люфт (угл. мин.) | Допустимый момент | Габариты | Применение |
| Планетарный | 96–98 | 1–10 | Высокий | Компактные | Роботы, ЧПУ, упаковка |
| Цилиндрический | 90–95 | 15–30 | Средний–высокий | Средние | Промышленные механизмы |
| Червячный | 70–85 | 20–40 | Средний | Компактные | Лифты, дозаторы, транспортёры |
| Гармонический | 80–90 | <1 | Средний | Минимальные | Робототехника, точные оси |
Выбор типа редуктора зависит от приоритетов задачи:
- если нужна максимальная точность и жёсткость — планетарный или гармонический;
- если важна простота и надёжность — цилиндрический;
- если требуется компактность и плавность хода — червячный.
При этом следует учитывать также тепловые характеристики, возможность установки в ограниченном пространстве и уровень шума, особенно при непрерывной работе.
Неверно выбранный тип редуктора может привести к люфту и вибрациям, что разрушает механику и снижает точность позиционирования. Например, использование червячного редуктора в сервосистемах высокой динамики приводит к перегреву и быстрому износу зубчатой пары.
Как подобрать передаточное отношение
Правильный выбор передаточного отношения — это основа эффективности работы связки серводвигатель + редуктор. От него напрямую зависят крутящий момент, скорость, точность и динамика системы. Если передаточное отношение выбрано неправильно, то двигатель будет либо перегружен, либо недогружен, что приведёт к снижению производительности или преждевременному выходу из строя оборудования.
Передаточное отношение показывает, во сколько раз редуктор снижает скорость вращения двигателя и увеличивает момент на выходе. Оно рассчитывается по формуле:
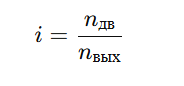
где:
- i — передаточное отношение,
- n₍дв₎ — скорость вращения вала двигателя, об/мин,
- n₍вых₎ — требуемая скорость вращения на выходе, об/мин.
После определения передаточного отношения можно рассчитать выходной крутящий момент:
![]()
где η — КПД редуктора (обычно 0,9–0,98 в зависимости от типа).
Пример расчёта:
Если двигатель развивает момент 2 Н·м при скорости 3000 об/мин, а выходной вал должен вращаться со скоростью 300 об/мин, то:
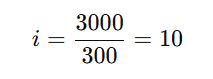
При КПД редуктора 0,95:
![]()
Таким образом, редуктор с передаточным отношением 10:1 обеспечит требуемый момент и допустимую скорость.
При выборе передаточного отношения важно учитывать не только момент и скорость, но и динамику системы. Слишком большое отношение увеличивает момент, но снижает скорость реакции, что делает систему «тормозной» при быстром позиционировании. Слишком малое — приводит к дефициту момента и необходимости использовать двигатель большей мощности.
Для сервоприводов также важно соблюдать баланс инерций. Оптимально, когда приведённая инерция нагрузки составляет не более 3–5 крат инерции ротора двигателя. При больших значениях система становится неустойчивой, особенно при резких изменениях направления вращения.
Рекомендуемые диапазоны передаточных отношений для типовых применений:
| Тип механизма | Типичная скорость нагрузки, об/мин | Рекомендуемое i | Примечание |
| Манипуляторы, оси ЧПУ | 50–200 | 5–15 | Приоритет — точность и плавность |
| Конвейеры, транспортеры | 100–500 | 10–25 | Согласование момента с массой груза |
| Упаковочные машины | 200–800 | 3–10 | Быстрые циклы, высокая динамика |
| Поворотные столы, дозаторы | <100 | 20–50 | Большой момент, минимальные люфты |
Передаточное отношение следует подбирать с учётом запаса по моменту (10–20%) и КПД редуктора. Также важно проверить, чтобы двигатель при максимальной нагрузке не выходил за пределы своего номинального тока.
Неправильное передаточное отношение приводит к серьёзным проблемам: при слишком большом — система теряет динамику и не успевает отрабатывать команды, при слишком малом — двигатель перегружается и перегревается. В результате точность позиционирования снижается, а механика изнашивается быстрее.
Как рассчитать нагрузку и момент инерции
Один из ключевых этапов при проектировании связки серводвигатель + редуктор — это точный расчёт нагрузки и момента инерции. Даже правильно подобранное передаточное отношение не гарантирует стабильной работы, если не учтена инерция движущихся масс. В сервосистемах соотношение инерций двигателя и нагрузки напрямую определяет плавность, точность и устойчивость управления.
Момент инерции (J) характеризует способность тела сопротивляться изменению скорости вращения. Чем он больше, тем труднее разогнать или остановить систему. Для правильной работы серводвигателя принято, чтобы приведённая инерция нагрузки не превышала 3–5-кратное значение инерции ротора двигателя:
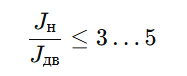
Если это соотношение превышено, двигатель не сможет быстро реагировать на команды, появятся вибрации и перерегулирования, особенно при реверсах.
Приведённый момент инерции нагрузки рассчитывается с учётом редуктора по формуле:
где:
- Jₙ — момент инерции нагрузки,
- i — передаточное отношение редуктора,
- J₍ред₎ — собственная инерция редуктора (обычно указывается в паспорте).
Из формулы видно, что редуктор существенно снижает инерцию, «видимую» двигателем. Именно поэтому он позволяет использовать более компактный и быстрый двигатель при сохранении высокой нагрузки на выходе.
Пример расчёта:
Пусть инерция нагрузки Jₙ = 0,002 кг·м², передаточное отношение редуктора i = 10, а инерция ротора двигателя J₍дв₎ = 0,0001 кг·м².
Тогда приведённая инерция:

Отношение инерций:
То есть соотношение 1:5 — в пределах нормы. Система будет стабильной, без вибраций и запаздываний.
При расчётах также важно учитывать:
- массу подвижных элементов (шкивы, валы, каретки, муфты);
- трение в направляющих и подшипниках;
- радиус вращающихся масс;
- реальный КПД механической системы.
Чтобы минимизировать избыточную инерцию:
- сокращают длину и массу вращающихся элементов;
- применяют облегчённые муфты и шкивы;
- уменьшают радиус вращающихся частей;
- подбирают оптимальное передаточное отношение.
Для практических расчётов используют упрощённые зависимости:
- для вала или барабана
 ;
; - для каретки на винтовой паре
 , где p — шаг винта.
, где p — шаг винта.
Если инерция нагрузки превышает допустимое значение, серводвигатель не сможет стабилизировать положение: появляются вибрации, дрожание при остановке и ошибки позиционирования. Перегрев и чрезмерная токовая нагрузка приводят к преждевременному износу подшипников и выходу из строя силовых модулей.
Пример подбора серводвигателя с редуктором
Чтобы показать на практике, как выбрать связку серводвигатель + редуктор, рассмотрим пример из промышленной автоматизации — привод подачи платформы упаковочной машины. Требуется обеспечить перемещение платформы массой 50 кг на расстояние 0,5 м за 0,5 секунды с плавным разгоном и остановкой.
1. Определение механических параметров
Платформа движется поступательно, но двигатель вращает винт или шкив, поэтому сначала переводим линейное движение в угловое.
Пусть используется винт с шагом 10 мм и диаметр эффективного витка 20 мм. Тогда:
1 оборот=10 мм хода
Для 0,5 м (500 мм) нужно:
500/10=50 оборотов
Если движение длится 0,5 с, то требуемая скорость вращения:

Для такой скорости большинство серводвигателей не подходят напрямую — требуется редуктор, чтобы согласовать момент и скорость.
2. Расчёт требуемого момента на нагрузке
Пусть сила сопротивления движения составляет 100 Н.
Момент на валу винта (радиус 10 мм = 0,01 м):
![]()
Добавляем запас 30%:
![]()
3. Подбор передаточного отношения
Предположим, выбран двигатель с номинальным моментом 0,3 Н·м при 3000 об/мин.
Необходимо обеспечить на выходе 1,3 Н·м.
С учётом КПД редуктора η = 0,95, получаем:
Округляем — i = 5:1.
Таким образом, редуктор 5:1 обеспечит необходимый момент при приемлемой скорости на выходе.
4. Проверка выходной скорости

Это даёт линейную скорость около:

За 0,5 с платформа пройдёт 50 мм — в 10 раз меньше требуемого значения. Следовательно, необходимо уменьшить передаточное отношение (до 1:1…2:1) или выбрать двигатель с большей скоростью.
На практике применяют итерационный подход:
- Выбирают диапазон скоростей;
- Проверяют момент и динамику;
- Корректируют параметры до получения требуемого результата.
5. Сравнение вариантов подбора
| Параметр | Вариант 1 (i=5:1) | Вариант 2 (i=2:1) |
| Выходной момент, Н·м | 1,3 | 0,57 |
| Скорость вала, об/мин | 600 | 1500 |
| Линейная скорость, мм/с | 100 | 250 |
| Динамика системы | Высокая точность, низкая скорость | Баланс скорости и момента |
| Применимость | Точные позиционные узлы | Подвижные платформы |
Оптимальным решением для данной задачи будет i = 2:1, так как оно обеспечивает достаточную скорость и момент при умеренной нагрузке на двигатель.
6. Выбор типа редуктора
Для серводвигателя предпочтителен планетарный редуктор — он обеспечит минимальный люфт (до 10 угл. мин.) и высокий КПД. При необходимости компактного решения допускается использование цилиндрического варианта с увеличенным запасом по моменту.
Игнорирование расчётов при подборе серводвигателя и редуктора приводит к ошибкам в 20–50% от требуемого момента. В результате двигатель работает с постоянным перегревом, редуктор изнашивается преждевременно, а система теряет точность позиционирования.
Ошибки при подборе и их последствия
Даже при использовании качественных компонентов система серводвигатель + редуктор может работать нестабильно, если расчёты выполнены с нарушениями. Ошибки на этапе проектирования и монтажа часто приводят к ускоренному износу редуктора, перегрузке двигателя и снижению точности позиционирования. Рассмотрим наиболее распространённые проблемы и их последствия.
1. Отсутствие расчёта передаточного отношения
Многие инженеры подбирают редуктор «на глаз» — ориентируясь на габариты или мощность двигателя, а не на фактические параметры нагрузки. В результате получаются либо чрезмерно «медленные» системы (при большом i), либо двигатели, работающие с перегрузкой (при малом i).
Пример: двигатель рассчитан на 3000 об/мин, редуктор выбран 30:1 без учёта нагрузки. В итоге выходная скорость слишком низкая, двигатель работает на высоком токе, перегревается, а редуктор испытывает постоянные динамические нагрузки.
2. Игнорирование люфта редуктора
Люфт (механический зазор между зубьями) — критически важный параметр для систем позиционирования. Если он превышает 10 угл. мин., то точность серводвигателя теряется, особенно при реверсивных движениях.
Для систем ЧПУ, робототехники и дозаторов следует выбирать редукторы с минимальным люфтом (1–5 угл. мин.).
3. Несоответствие момента инерции двигателя и нагрузки
Одна из самых частых ошибок — установка редуктора без проверки инерционного согласования. Если инерция нагрузки слишком велика, двигатель не может её стабилизировать: появляются вибрации, рывки и колебания при остановке.
Это не только снижает точность, но и перегружает подшипники, что ведёт к преждевременному износу.
4. Игнорирование КПД и тепловых потерь
Каждый редуктор имеет свои потери на трение. При неправильной оценке КПД двигатель вынужден компенсировать недостающую мощность, работая на предельном токе. В результате происходит перегрев обмоток, деградация изоляции и ускоренный износ.
5. Ошибки монтажа: несоосность и перекос
Даже идеально рассчитанная система может выйти из строя, если при сборке нарушена соосность валов. Это вызывает неравномерное распределение нагрузки по зубьям, повышенную вибрацию и разрушение подшипников. Для серводвигателей особенно важно использовать гибкие или компенсирующие муфты.
6. Применение неподходящего типа редуктора
Например, использование червячного редуктора в системе с частыми реверсами. Такие передачи не рассчитаны на динамические нагрузки, из-за чего быстро теряют КПД и перегреваются. Для сервосистем предпочтительнее планетарные или гармонические редукторы.
Даже качественный серводвигатель быстро выходит из строя при неправильном подборе или установке редуктора. Перегрузка, люфт, несоосность и перегрев приводят к разрушению подшипников, поломке зубчатой пары и выходу из строя электроники. Ошибка инженера на этапе подбора может стоить предприятию дорогостоящего простоя.
Современные решения HNC Electric и практические рекомендации
HNC Electric предлагает сервисные решения для точного позиционирования и высокодинамичных задач, представленные несколькими линейками сервоприводов. Ключевые серии и их подтверждённые особенности:
Серии сервоприводов HNC Electric
-
HSD-7 — сервосистема для задач с высокой частотой и точностью позиционирования. Подтверждённые функции: авторегулировка по уровню, самоподстройка, компенсация трения и люфта, динамическое торможение, подавление вибраций, безопасная остановка, полностью замкнутая петля обратной связи, поддержка популярных интерфейсов, удобное ПО. Частота отклика до 3,1 кГц (по PDF).
-
SV-E3 — серия для автоматических систем с упором на надёжность и точность движения (позиционирование, стабильность, долговечность). Рекомендуется как универсальная платформа для типовых задач автоматизации.
-
AUCTECH AD2 / AD3 (в каталоге HNC Electric) — модели с входным напряжением 220 В (3 фазы) и 380 В (3 фазы); по таблицам каталога доступны типоразмеры с номинальными скоростями 3000 об/мин и максимальными 5000–6000 об/мин (конкретные значения зависят от исполнения). Эти серии удобны, когда критична привязка к стандартным скоростям и напряжениям сети.
Дополнительно на сайте доступна официальная документация (включая «Руководство по эксплуатации HSD7»), что ускоряет внедрение и настройку.
Рекомендации по применению (связка «серво + редуктор»)
-
Для задач высокоточного позиционирования и быстрой динамики выбирайте HSD-7; функция компенсации трения/люфта и высокая частота отклика помогают минимизировать погрешности при реверсах. Для типовых автоматических линий — SV-E3. Для проектов, где важны стандартные напряжения и «классические» скорости, рассмотрите AD2/AD3.
-
При подборе редуктора ориентируйтесь на требования механики: минимальный люфт (для точных осей), достаточный КПД и согласование инерций; сервосистемы HNC поддерживают закрытую петлю и функции подавления вибраций, что облегчает настройку системы «серво + редуктор». (Общие требования; функции подтверждены для HSD-7.
-
Используйте официальные руководства и материалы с сайта HNC Electric на этапах пуско-наладки и настройки параметров привода.
| Линейка | Ключевой профиль задач | Подтверждённые особенности |
|---|---|---|
| HSD-7 | Высокая точность и динамика | Частота отклика до 3,1 кГц; компенсация трения/люфта; подавление вибраций; безопасная остановка; замкнутая петля; интерфейсы связи; удобное ПО. |
| SV-E3 | Универсальные автоматические системы | Контроль и высокая точность движений; надёжность/долговечность. |
| AUCTECH AD2/AD3 | Стандартные сети и скорости | Питание 220/380 В (3 фазы), макс. скорость до 6000 об/мин (по конкретным моделям). |
Все характеристики, приведённые выше, взяты исключительно из разделов каталога и документов на hnc-electric.ru. При подготовке проекта сверяйте параметры по актуальным таблицам на карточках серий и в руководствах эксплуатации на сайте — это гарантирует корректный выбор и сохранение гарантийных условий.
Заключение
Сочетание серводвигателя и редуктора — одно из самых эффективных решений для систем промышленной автоматизации. Такой тандем обеспечивает оптимальный баланс между скоростью, точностью и крутящим моментом, позволяя реализовывать стабильную, плавную и надёжную работу оборудования. Однако эффективность сервопривода напрямую зависит от правильного подбора и расчёта всех элементов передачи.
Компания HNC Electric предлагает инженерам и интеграторам готовые, технически согласованные комплекты «серводвигатель + редуктор», которые исключают проблемы с совместимостью и настройкой. Каждая модель проходит заводскую калибровку и оптимизирована для точного позиционирования, высокой динамики и устойчивой работы даже при многосменных нагрузках.
Благодаря широкому диапазону мощностей, высоким КПД редукторов и интеллектуальным функциям управления, решения HNC Electric успешно применяются в робототехнике, упаковочном оборудовании, транспортных системах, металлообработке и производственных линиях различного масштаба.
Используя оригинальные компоненты HNC Electric, предприятия получают гарантированную точность, стабильность и долговечность привода без риска несовместимости или перегрева. Это снижает эксплуатационные затраты и обеспечивает бесперебойную работу автоматизированных систем в долгосрочной перспективе.
Экономия на подборе и использовании неоригинальных компонентов приводит к снижению точности, перегрузкам и простоям оборудования. Оптимальным решением является применение фирменных комплектов «серводвигатель + редуктор HNC Electric», рассчитанных на длительную и безопасную эксплуатацию в любых промышленных условиях.