 Перейти к содержимому
Перейти к содержимому 
ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) является одним из важнейших элементов систем автоматического управления в преобразователях частоты (ПЧ). Его основная задача — обеспечение точного и стабильного поддержания требуемого технологического параметра: скорости, давления, температуры, уровня и других характеристик.
В условиях промышленной эксплуатации правильная настройка ПИД-регулятора критически влияет на эффективность работы оборудования, его надёжность, срок службы и энергопотребление. Грамотно настроенная система позволяет минимизировать колебания выходного параметра, избежать аварийных остановов и продлить ресурс привода.
Ошибочная настройка ПИД-регулятора может привести к возникновению автоколебаний, перегреву двигателя, выходу из строя механических компонентов и росту энергопотребления. На крупных объектах это приводит к значительным материальным потерям.
Принцип работы ПИД-регулятора в ПЧ
Основные компоненты ПИД-регулирования
ПИД-регулятор вычисляет управляющее воздействие по следующему принципу:
- Пропорциональная составляющая (P) — увеличивает управляющее действие пропорционально величине текущей ошибки.
- Интегральная составляющая (I) — компенсирует накопленные отклонения за время, устраняя постоянную ошибку.
- Дифференциальная составляющая (D) — компенсирует резкие изменения ошибки, сглаживая переходные процессы.

Особенности ПИД-регуляции в преобразователях частоты
В ПЧ ПИД-регулятор обычно используется для обратной связи по току, скорости или внешнему датчику процесса. Примеры:
- поддержание постоянного давления в насосных установках;
- стабилизация скорости вращения на конвейерах;
- регулирование температуры в печах.
Различные ПЧ имеют свои особенности реализации ПИД-регуляторов: фиксированные коэффициенты, адаптивное регулирование, наличие предустановленных режимов автонастройки.
Где применяется ПИД-регулирование в преобразователях частоты
Типовые области применения
- Насосные станции
- Регулирование давления воды или теплоносителя.
- Вентиляционные системы
- Управление скоростью вентиляторов для поддержания постоянного расхода воздуха.
- Конвейеры
- Точная регулировка скорости транспортировки материалов.
- Станки и производственные линии
- Поддержание заданной скорости шпинделя или подачи заготовок.
- Климатическое оборудование
- Регулирование температуры через управление компрессорами и вентиляторами.
Особые условия применения
В высокоточных приложениях, например, в химической промышленности или фармацевтике, требования к качеству регулирования значительно выше, и настройка ПИД-регулятора должна учитывать динамику системы и внешние воздействия.
Основные этапы настройки ПИД-регулятора
1. Подготовка оборудования
- Проверка всех механических соединений.
- Проверка работоспособности датчиков и исполнительных механизмов.
- Настройка базовых параметров преобразователя частоты (например, частоты несущего сигнала, пределов тока).
2. Установка начальных параметров
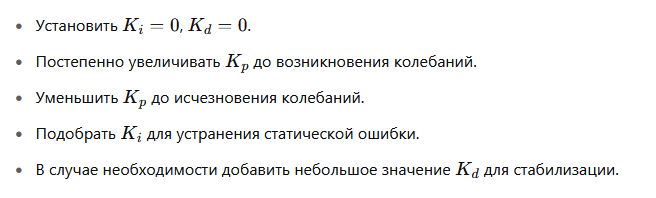
Обычно рекомендуется начать с нулевых значений интегральной и дифференциальной составляющих и подобрать коэффициент пропорциональности до достижения приемлемого качества регулирования.
3. Проведение тестовых запусков
- Постепенное изменение задания.
- Наблюдение за динамикой системы: амплитудой колебаний, временем переходного процесса.
4. Корректировка параметров

Отсутствие этапа тестирования и анализа реакции системы может привести к скрытым дефектам, проявляющимся только при длительной эксплуатации или резких изменениях нагрузки.
Методы настройки ПИД-регулятора
Ручная настройка (метод последовательных приближений)
Алгоритм:
Автоматическая настройка
Преобразователь частоты выполняет серию тестов, анализирует поведение системы и рассчитывает оптимальные коэффициенты.
Преимущества:
- Быстрая настройка.
- Минимизация ошибок оператора.
Недостатки:
- Меньшая точность по сравнению с ручной настройкой в специфичных задачах.
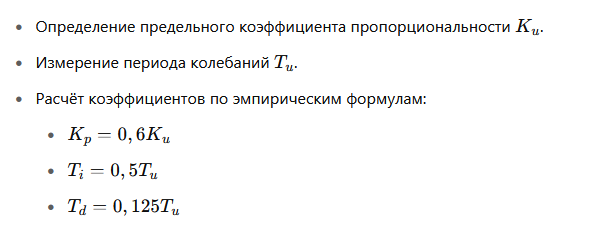
Метод Зиглера-Николса
Широко используемый классический метод:
Применение шаблонных методов без учёта инерционных свойств конкретного оборудования может привести к неточности регулирования или даже аварийным режимам.
Типичные ошибки при настройке и их последствия
Завышенные коэффициенты
- Сильные колебания выходного параметра.
- Перегрев двигателя из-за частых изменений нагрузки.
- Повышенный износ подшипников и механических соединений.
Заниженные коэффициенты
- Медленная реакция на изменение задания.
- Увеличение времени переходных процессов.
- Невозможность стабильно поддерживать требуемое значение.
Игнорирование характеристик объекта управления
- Ошибки в подборе коэффициентов.
- Неучёт времени запаздывания приводной системы.
- Неверная оценка внешних возмущений.
Отсутствие верификации настроек
- Рабочая точка может быть стабильной только в узком диапазоне условий.
- Срыв регулирования при изменении нагрузки.
Рекомендации по безопасной и эффективной настройке ПИД-регулятора
- Использовать рекомендованные производителем алгоритмы первичной настройки.
- Проводить настройку при минимальной нагрузке, постепенно увеличивая её.
- При критичных объектах применять методы моделирования до фактической настройки.
- Внедрять системы защиты от срыва регулирования.
- Проводить регулярные проверки актуальности настроек.
Поддержка квалификации персонала
Обучение специалистов принципам работы ПИД-регуляторов, особенностям их настройки на конкретных моделях ПЧ является обязательным условием стабильной работы оборудования.
Настройка ПИД-регулятора в преобразователях частоты — сложный, но обязательный процесс для достижения максимальной эффективности работы приводных систем. При правильной настройке достигается снижение энергопотребления, увеличение срока службы оборудования и повышение общей надёжности производства.
Компании, работающие в сфере поставки и эксплуатации оборудования, должны уделять повышенное внимание этому процессу, инвестируя в обучение персонала и внедрение стандартов качества настройки.