 Перейти к содержимому
Перейти к содержимому 
Работа частотного привода в четырех квадрантах и динамическое торможение
При эксплуатации в режиме четырех квадрантов частотный преобразователь должен не только передавать энергию к двигателю, но и обеспечивать её эффективный отток при торможении. Хотя существует торможение постоянным током, оно работает в ограниченном диапазоне частот и применяется в основном для предварительного намагничивания двигателя, а также для удержания вала на низких оборотах. Однако основной метод торможения в частотных преобразователях — динамическое торможение, основанное на переводе двигателя в генераторный режим.
Возникает проблема отвода избыточной энергии, поскольку стандартный выпрямитель не предназначен для её возврата в сеть. При этом напряжение в звене постоянного тока возрастает, что может привести к срабатыванию ошибки «перенапряжение». Это особенно актуально для механизмов с высокой инерцией, например, рулонов листового металла, роторных дробилок, крупных шестерен и барабанов, где резкое торможение сопровождается значительным выбросом энергии.
Принцип работы динамического торможения
Динамическое торможение — это процесс рассеивания избыточной энергии, вырабатываемой нагрузкой при рекуперации, посредством специальных тормозных резисторов.
Для этого применяется тормозной модуль (так называемый «чоппер»), который представляет собой электронный ключ, коммутирующий избыточное напряжение постоянного тока на резистор. В результате энергия рекуперации преобразуется в тепло и рассеивается.
Тормозной модуль активируется автоматически при превышении установленного порога напряжения на шине постоянного тока. Этот параметр можно регулировать в зависимости от номинального напряжения питания инвертора, что позволяет адаптировать систему к конкретным условиям эксплуатации.
Тормозные резисторы: необходимость и применение
Применение тормозных резисторов оправдано в следующих случаях:
- Если требуется интенсивное торможение с продолжительностью более 10% от полного цикла работы;
- Для предотвращения ошибки «перенапряжение» при подключении двигателя к нагрузке с высокой инерцией или несбалансированным моментом;
- В системах, где нагрузка способствует вращению двигателя (например, лифты, краны, подъемные механизмы);
- В системах, требующих высокой точности позиционирования при перемещении объектов, особенно в вертикальной плоскости.
В зависимости от модели частотного преобразователя резисторы могут подключаться напрямую (если встроенный тормозной ключ предусмотрен) или через дополнительный тормозной модуль. Если тормозной цикл занимает более 10% времени, следует провести проверку на соответствие ключа или модуля допустимым длительным токовым нагрузкам.
Выбор тормозных резисторов требует учета их номинального сопротивления и мощности рассеивания. Эти параметры указываются в технической документации на преобразователь частоты. Важно соблюдать несколько правил:
- Мощность и сопротивление резисторов приводятся для режима работы с ПВ (периодичность включения) 10%. При других условиях требуется пересчет;
- Сопротивление не должно быть ниже минимально допустимого значения, чтобы исключить чрезмерный ток в цепи торможения;
- Завышенное сопротивление снижает эффективность торможения, так как уменьшает отвод мощности;
- Длительность работы резисторов в каждом цикле не должна превышать 120 секунд — в противном случае считается, что резистор работает при ПВ 100%.
Расчет параметров тормозной системы
Подбор тормозного резистора и модуля производится на основе расчета выделяемой мощности при торможении. Для этого необходимо определить баланс между рекуперируемой мощностью и мощностью, рассеянной на резисторах.
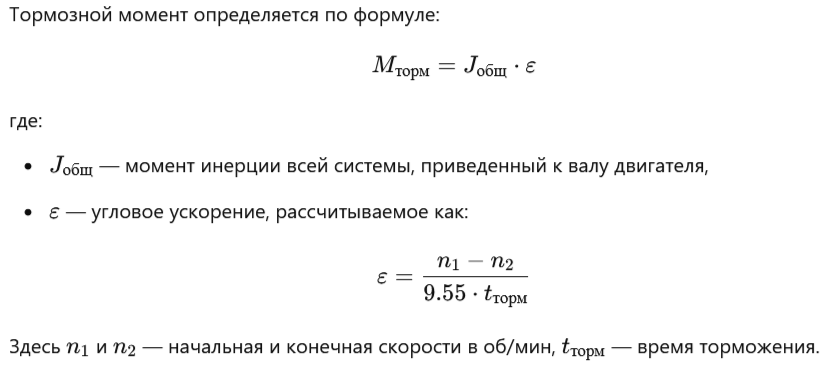
1. Определение тормозного момента
2. Определение мощности торможения

При этом важно учитывать, что пиковая мощность зависит от начальной частоты торможения. Ошибочно рассчитывать её на основе разницы начальной и конечной скоростей — это может привести к занижению расчетных значений.
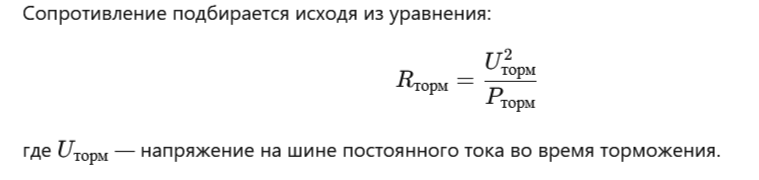
3. Расчет сопротивления тормозного резистора
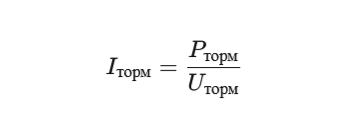
4. Определение необходимого тормозного тока
Если используется внешний тормозной модуль, расчет тормозного тока проводится по формуле:
При выборе тормозного модуля следует учитывать запас по току (коэффициент 1.25–1.5), поскольку фактическое напряжение на шине может превышать расчетное значение, а сопротивление резистора может незначительно отличаться от номинала.
Выбор тормозного резистора и модуля
После определения тормозного тока подбирается подходящий модуль. Затем, исходя из расчетных значений тока и напряжения, выбирается резистор по закону Ома.
Важно также учитывать режим работы. В грузоподъемных механизмах, где торможение может длиться более минуты, необходимо закладывать ПВ не менее 60%, а в некоторых случаях — до 100%. Для точного расчета требуется анализ теплового баланса резисторов, их способности рассеивать мощность в течение пауз между циклами торможения.
Грамотный подбор и настройка системы торможения частотного привода позволяют обеспечить надежную работу механизма, предотвратить аварийные ситуации, продлить срок службы оборудования и повысить его энергоэффективность. Учет параметров инерционности нагрузки, корректный выбор тормозного резистора и модуля помогают избежать ошибок в эксплуатации и обеспечить стабильность работы привода в режиме четырех квадрантов.